近日,1946伟德国际源自英国师生在仿生可展开结构重塑压电驱动微型机器人方面取得创新性进展,相关成果以“Bioinspired, piezoelectrically-actuated deployable miniature robots”为题发表在《材料科学与工程R:报告》(Materials Science and Engineering R: Reports)(IF=26.8)。伟德国际victor1946为该论文第一完成单位,1946伟德国际源自英国硕士生刘弘毅为论文第一作者,合作者包括南方科技大学孙进兴博士,伟德国际victor1946硕士生张奕、陈晨。1946伟德国际源自英国副教授张彦虎、中科院半导体研究所研究员慈鹏弘、北京大学终身教授董蜀湘为共同通讯作者。
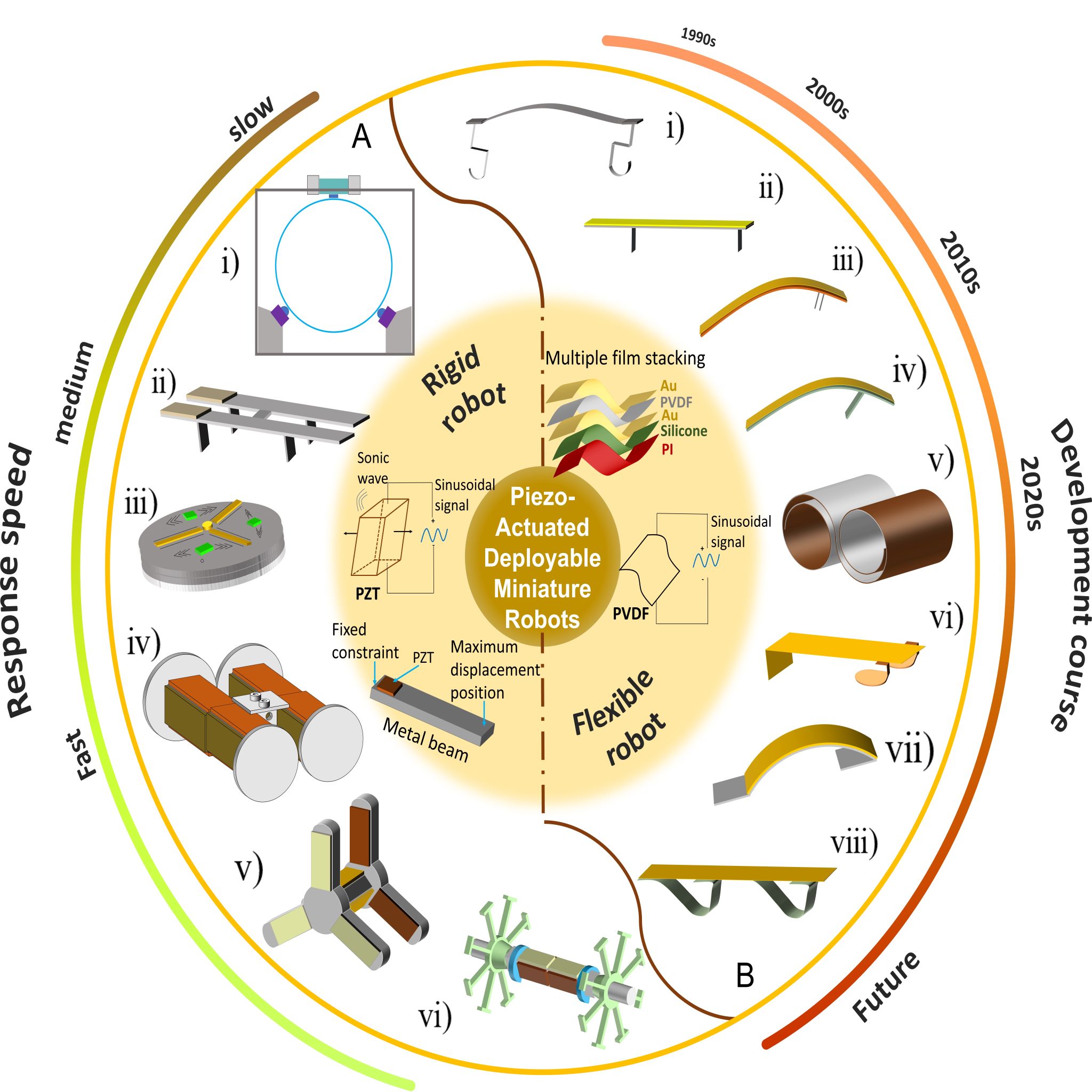
图1 压电机器人的比较分析——突出响应速度和发展历程
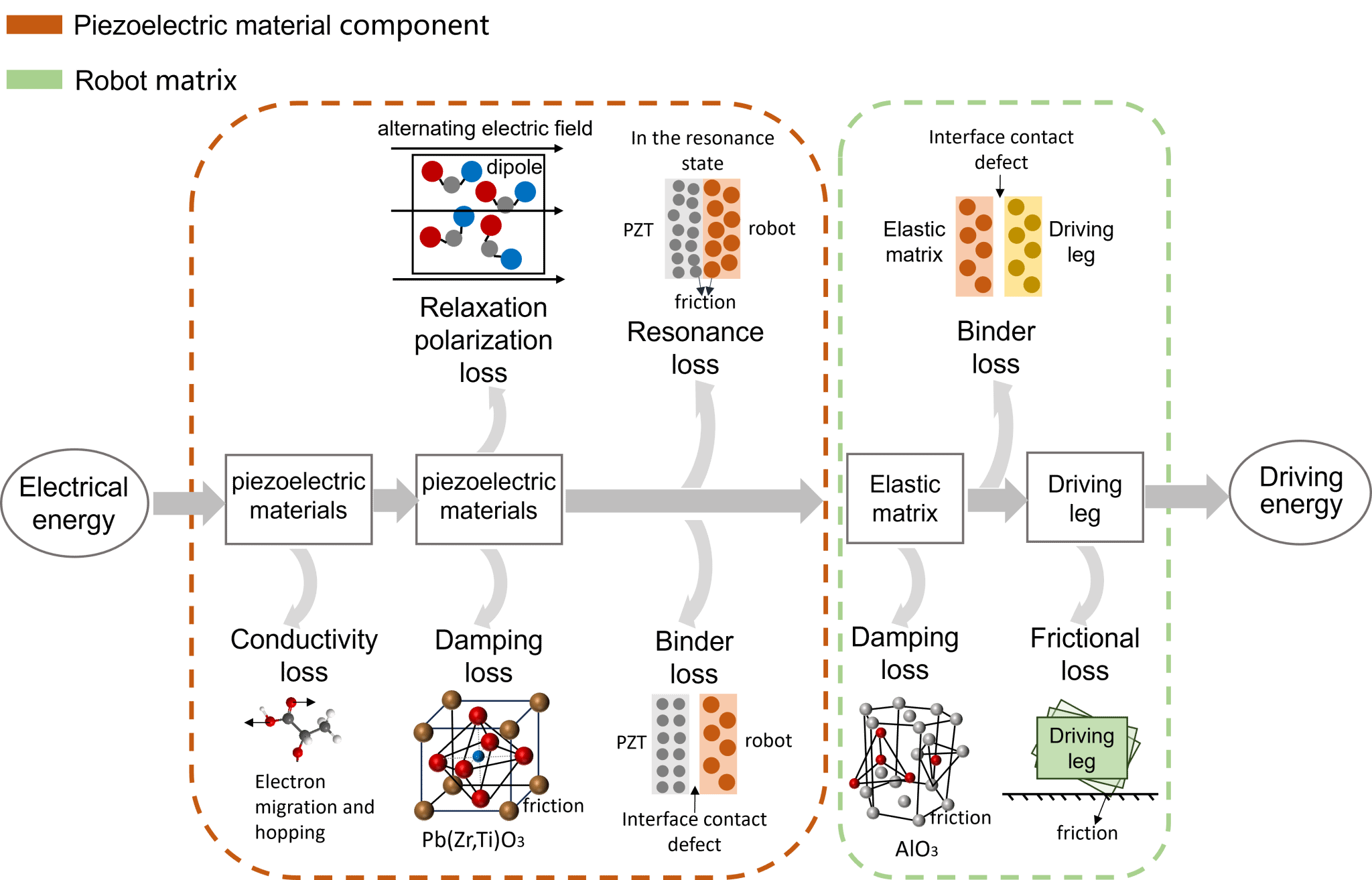
图2 压电驱动微型机器人中能量传输路径的系统框架

图3 智能响应结构——基于激发源的分类与演化
仿生可展开压电机器人正在成为突破空间限制、执行关键任务的尖端利器。智能材料的飞跃,正推动着灵巧、精密的微型机器人迅猛发展。该研究工作系统梳理高适应性压电驱动微型机器人的发展脉络、机制与应用,指出其当前面临的挑战,包括材料机理、结构设计、机电控制、微观界面调控以及未来研究方向(如多功能集成、统一评价体系、微型机器人智能化)等,为高性能微型压电机器人的未来发展和在柔性电子、智能机电装备、高可靠性系统等领域的应用奠定基础。
本工作得到了国家重点研发计划 (Grant No.2022YFB3205700)和国家自然科学基金 (No.12304540,No.51705210)的资助。
原文链接:https://doi.org/10.1016/j.mser.2025.101054